Ho costruito un paio di anni fa un controller per questo gioco al museo, richiedeva i caratteri QWERT, con Arduino Duemilanove è stato un pasticcio, inviao i caratteri sulla seriale e poi li leggevo con il monitor e poi il gioco in qualche modo (ma per me è ancora un mistero) se li ciucciava.
Poi è arrivato il Leonardo, carichi la libreria giusta ed il gioco è fatto.
Poi è arrivao il micro, idem come sopra.
Il Micro lo colleghi direttamente all'USB, lo programmi come un Arduino normale, i pin sono gli stessi. Fine.
In questo post pubblico semplicemente qualche foto del lavoro, i pochi componenti li ho saldati direttamente sulla scheda, un lavoro veloce veloce. Pubblico in fondo anche il codice.
Sulla sinistra in alto le 5 resistenze di elevato valore, in alto a destra i led che indicano la "pressione" del pulsante.
il collegamento dei pin verso l'esterno è affidato ad una serie di 5 coccodrilli (che verranno presumibilmente collegati ad oggetti modellati con il play doh)
questi i comandi inviati al PC
E qui sotto il lavoro completo e chiuso
Il circuitino a Fritzing:
Altre importanti informazioni in merito al circuito ed al sistema in quest'altro post.
Lo sketch:
#include <CapacitiveSensor.h>
CapacitiveSensor Q = CapacitiveSensor(13, 12);
CapacitiveSensor W = CapacitiveSensor(13, 11);
CapacitiveSensor E = CapacitiveSensor(13, 10);
CapacitiveSensor R = CapacitiveSensor(13, 9);
CapacitiveSensor T = CapacitiveSensor(13, 8);
int soglia = 100;
int ledQ= 6;
int ledW= 5;
int ledE= 4;
int ledR= 3;
int ledT= 2;
void loop()
{
long start = millis();
long totaleQ = Q.capacitiveSensor(30);
long totaleW = W.capacitiveSensor(30);
long totaleE = E.capacitiveSensor(30);
long totaleR = R.capacitiveSensor(30);
long totaleT = T.capacitiveSensor(30);
*** post incompleto***
Faccio un uovo elettronico.
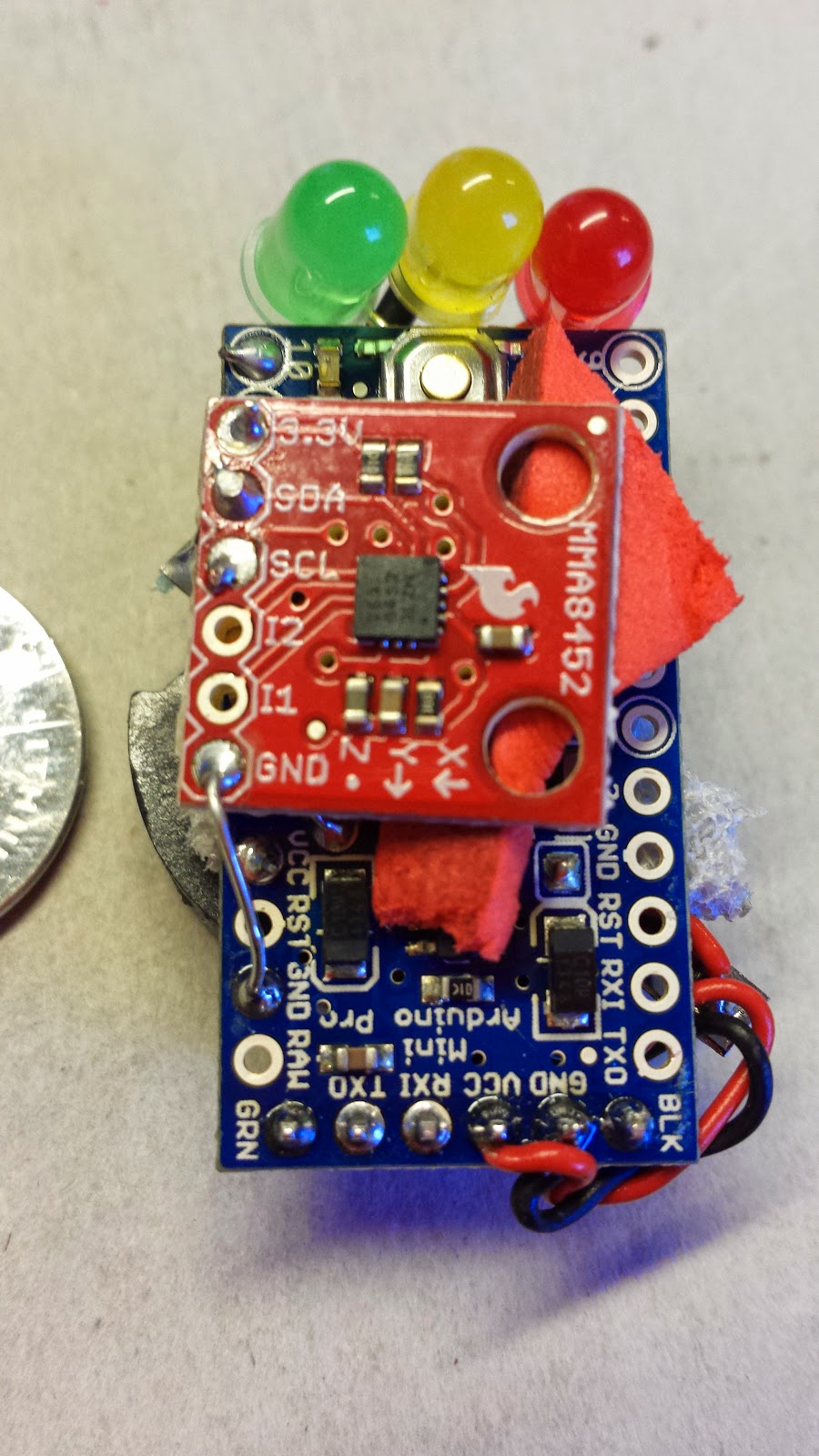
Arduino mini, un accelerometro MMA8452, tre led e un porta batteria 2016 con batteria.
L'arduino i questione non si può collegare direttamente al pc, non ha la porta usb, quindi per programmarlo o vi trovate un arnese apposta oppure vi prendete un altro arduino e lo usate come programmatore.
Pubblico poi gli schemi con fritzing, intanto le foto:
Qui di seguito l'uovo elettronico assemblato, la schedina rossa è il sensore accelerometro, quello sotto blu ovviamente l'arduino, sopra tre led: verde= dispositivo acceso, giallo= forza compresa tra 3 e 4 g, rosso= oltre 4 g.
Il sensore il sensore MMA8452 si può tarare con valori massimi di 2, 4 oppure 8g, lo trovate qui per esempio, costa 9 euro.
nell'ultimo post, che potete trovare qui, vi raccontavo di arduino controllato con sensori capacitivi; a cosa serviva?
Per fare questo prototipo di un'altra cosa ancora più grande che posterò a metà luglio (pare).
Il modello è stato costruito dal collega Stefano. I tubini di plastica saranno dei bei tuboni da un metro in plexy o policarbonato, sotto il coperchio troverà posto una piastrina metallica per il contatto capacitivo.
Avvicinando la mano quindi si varia la capacità del circuito ed Arduino manderà, in base al tubo selezionato, un carattere al PC. Abbiamo concordato con Annalisa, che si sta occupando della programmazione del videogame, l'ordine dei tasti come: QWERTYUI. Qui sotto una anteprima del software:
Oltre all'invio del carattere Arduino provvederà ad illuminare i tasti selezionati, forse con delle dicroiche led, comandate da una serie di Mosfet. Nelle foto sotto ho utilizzato dei comuni led ad alta luminosità:
All'interno della scatola il solito arduino pimpato
Di seguito lo schema Fritzing del circuito (ma mica adesso lo faccio...)
Sfiorando la guaina dei cavetti bianchi, al pc vendono inviati dei caratteri tastiera, da sinistra a destra (per scelta) QWERTYUI.
Il circuito è lo stesso di questo qui, sulla striscia blu del ground della bread bord ho collegato il piede numero 7 che in qualche modo è il "comune", le resistenze un po' grosse non sono tutte uguali (ho montato quelle che avevo).
Questo circuitino mi serve per costruire il controller di un videogame che produrrà l'amica e collega Annalisa. Ci siamo accordati per i quattro pulsanti delle due postazioni che saranno collegati ai caratteri della tastiera QWER e TYUI.
I due giocatori sfioreranno con le mani uno dei quattro tubi opalescenti davanti a loro, questi oltre ad inviare il carattere al pc si illumineranno con dei led colorati, pare...
Questo nel filmato è il prototipo di un giocattolone che raggiungerà un metro e mezzo di lato. Il basamento in legno con tutti i tubini di ottone lo ha costruito il collega Stefano, non avrei mai potuto fare un lavoro così tanto preciso! Scopo del gioco? Far raggiungere l'altro capo di ogni tubino dalla piccola maniglia senza che questa tocchi mai il tubino stesso. Un po' come L'allegro chirurgo .
Come funziona?
Il sito sul quale ho trovato tutte le informazioni è questo:
http://playground.arduino.cc/Main/CapacitiveSensor?from=Main.CapSense
l'immagine che spiega bene tutto è questa qui:
Provo a spiegarlo anche io nel modo più semplice possibile
Il circuito è composto da un emettitore che invia un segnale ad un ricevitore, il tempo che intercorre tra invio e ricezione dipende tra le altre cose dalla Capacità del circuito. Questa capacità varia in funzione di quanto vi avvicinate voi, è proprio il vostro corpo infatti che funge da armatura -insieme al circuito stesso- di questo grosso condensatore (un po' come lo schermo del vostro smartphone, che è di vetro, ma comunica all'apparecchio dei segnali elettrici sfruttando proprio la variazione di capacità). Parlando in termini di Arduino:
Prima di tutto si carica la libreria dei cap sensor
#include <CapacitiveSensor.h> che trovate qui
poi vado a dichiarare quale dei pin emette il pwm e quale riceve
CapacitiveSensor *nome del sensore*= CapacitiveSensor(*numero pin emettitore*, *numero pin ricevitore*);
Imposto così uno dei pin di Arduino come emettitore di un segnale PWM che invio ad un altro pin, quello ricevitore (di fatto in ascolto del segnale PWM inviato). Il tempo che intercorre tra l'invio e la ricezione di questo treno di impulsi dipende appunto oltre che dalla resistenza (fissa) anche dalla Capacità del circuito che varia più o meno in funzione della vostra presenza.
Nel resto del programma inserisco una tara sul valore di tempo tra "spedizione e ricezione", 30 msec in questo esempio, e poi un valore di soglia che serve ad aggiustare un po' il tiro sul valore totale.
Ho inserito anche la libreria "pitches.h", che riporto alla fine, serve per suonare una melodia differente ogni volta che si verifica la condizione di "tubo toccato".
Il circuito:
Come nel fantastico schemino qui sopra, si collega una resistenza tra il pin in unscita e quello in ingresso, a valle va il contatto capacitivo, tutto qui. Il valore della resistenza varia in funzione della sensibilità che, come indicato sul sito Arduino, sarà più o meno:
1 Mohm solo a contatto
10 Mohm tra 10 e 15 cm circa
40 Mohm tra 30 e 60 cm circa
Nella foto qui sopra il circuito un pochino pasticciato del prototipo, la shield era stata creata per un Arduino Mega, qui riciclata.
In basso a destra c'è il cicalino collegato sul morsetto azzurro in basso a sinistra.
Il cavo grigio (un cavo ethernet cat 5 riciclato) collega i led bianchi sulla basetta in legno, appena a sinistra del connettore le resistenze per i led.
Subito sopra il connettore che collega i quattro sensori con le relative resistenze da 10 mega.
Una bella piattina riciclata da un bus dati collega i pin di uscita che comandano, tramide dei mosfet N, una barra led RGB che proviene dritta dritta dal mio camper. Quattro sensori = 4 colori, RGB e... in lato a destra un bell'accrocchio con dei diodi, la quarta uscita mosfet alimenta sia il rosso che il verde e quindi "giallo".